


Kit de robot 12 en 1 WeeeBot RobotStorm STEAM
د.ت 1.980,000
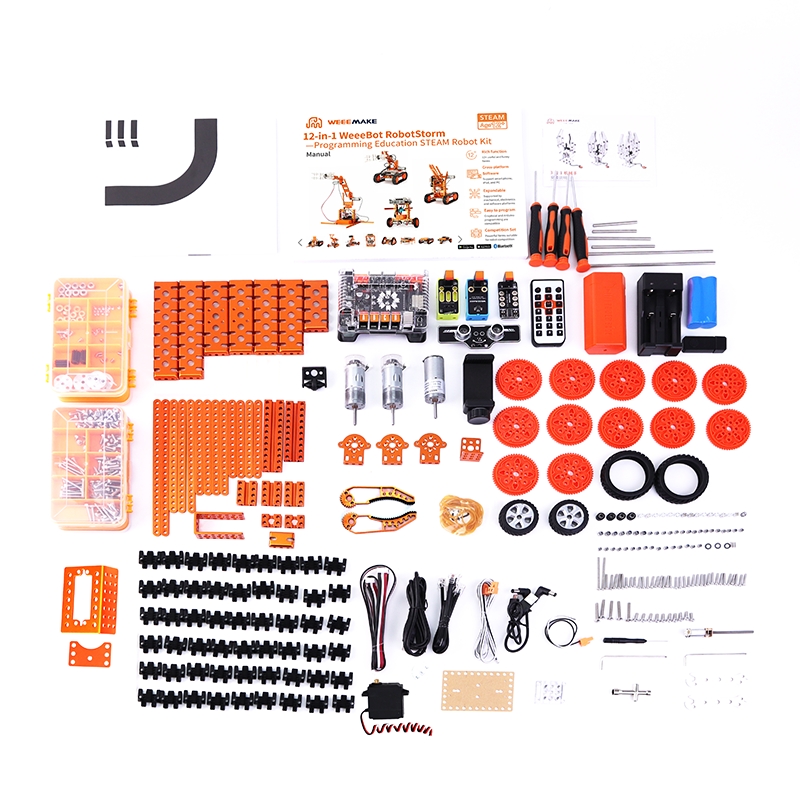
Le kit de robot WeeeBot Robotstorm STEAM 12-en-1 est un kit de robot STEAM ultime multifonctionnel. Il a plus de 450 pièces et contient 12+ formes prédéfinies sympas. Que vous soyez un ingénieur en mécanique ou en électronique, un ingénieur logiciel, un enseignant, un étudiant ou un fabricant, ce kit vous permet d’apprendre facilement la structure mécanique liée aux robots, l’électronique et les connaissances en programmation, d’encourager le travail d’équipe pour la compétition de robots.
Ce kit est une puissante bibliothèque de pièces composée de plus de 450 pièces. Avec des pièces mécaniques robustes telles que des poutres, des plaques, des supports, des engrenages, des pinces, des chenilles, des arbres, des roues et des modules électroniques faciles à utiliser tels que la carte mère ELF, le capteur à ultrasons RVB, le capteur de suivi de ligne, le capteur gyroscope, l’interrupteur de fin de course, le module RGB LED-8, le capteur de lumière, le capteur de son, le buzzer, le récepteur IR, le module Bluetooth, le dongle Bluetooth, vous pouvez obtenir une expérience pratique améliorée sur un robot à 12 différences programmable de manière sans fil.
Projets
.png) Bras robotique 1.4DOF : Le robot 4DOF Robot Arm est un bras robotique doté de quatre degrés de liberté. Ce bras robotique est entraîné par deux moteurs à courant continu encodeur, un moteur à courant continu de 37 et un servomoteur dans la pince de robot.
Bras robotique 1.4DOF : Le robot 4DOF Robot Arm est un bras robotique doté de quatre degrés de liberté. Ce bras robotique est entraîné par deux moteurs à courant continu encodeur, un moteur à courant continu de 37 et un servomoteur dans la pince de robot.
.png) 2. Robot Arm Tank : Le Robot Arm Tank est un robot composé d’un châssis de réservoir, d’une structure de bras de robot et d’une pince de robot en métal.
2. Robot Arm Tank : Le Robot Arm Tank est un robot composé d’un châssis de réservoir, d’une structure de bras de robot et d’une pince de robot en métal.
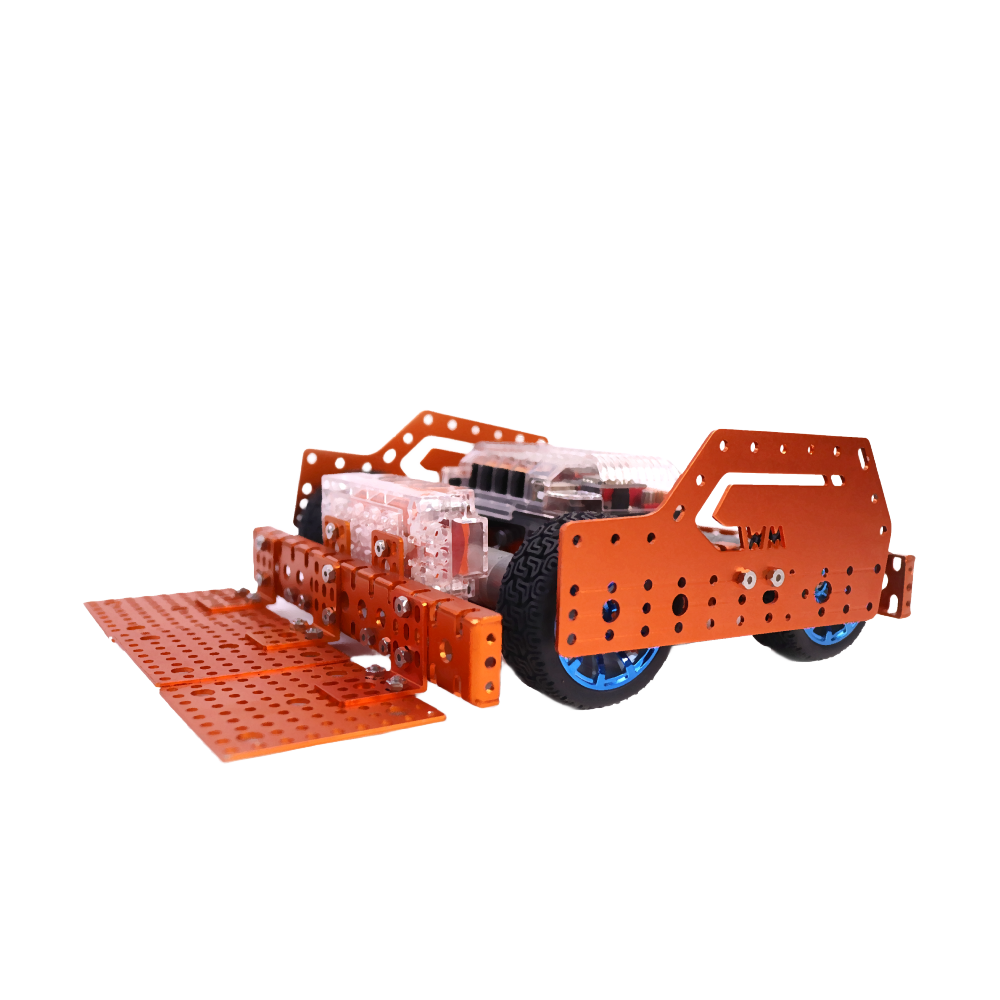
.png) 3. Robot élévateur : Une voiture robot chariot élévateur qui peut soulever et déplacer des objectifs. Le mécanisme de levage est constitué d’un curseur et d’une structure de transmission.
3. Robot élévateur : Une voiture robot chariot élévateur qui peut soulever et déplacer des objectifs. Le mécanisme de levage est constitué d’un curseur et d’une structure de transmission.
.png) 4. Robot lanceur de balles : Le robot lanceur de balles est un robot qui peut déplacer et tirer des balles de la taille d’un ping-pong. Il se compose d’un châssis de char et d’un mécanisme de tir. Un fichier 3D supplémentaire pour conteneur de ping-pong est fourni pour les écoles équipées d’une imprimante 3D.
4. Robot lanceur de balles : Le robot lanceur de balles est un robot qui peut déplacer et tirer des balles de la taille d’un ping-pong. Il se compose d’un châssis de char et d’un mécanisme de tir. Un fichier 3D supplémentaire pour conteneur de ping-pong est fourni pour les écoles équipées d’une imprimante 3D.
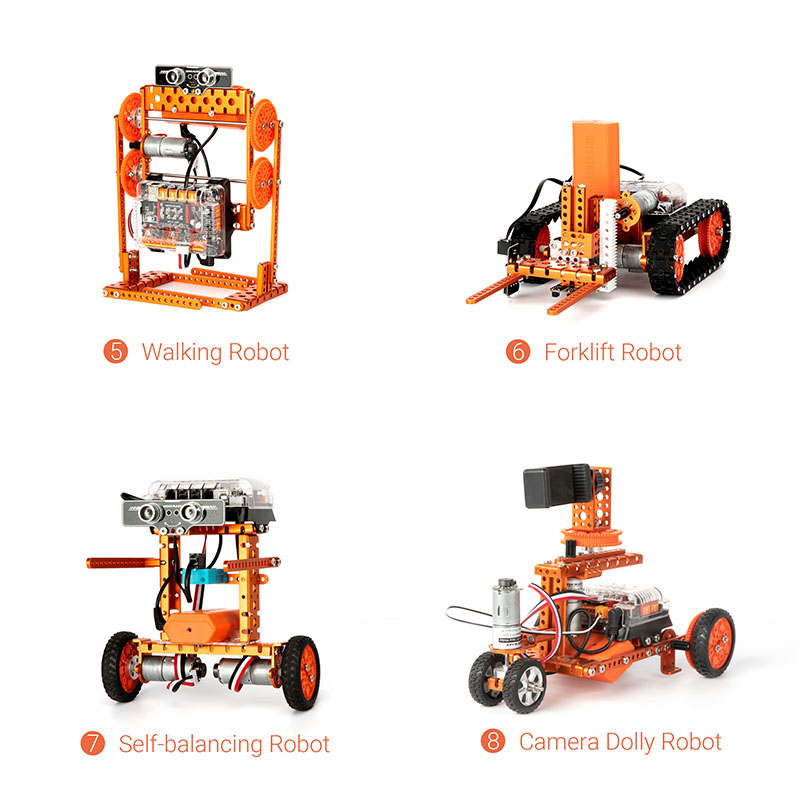
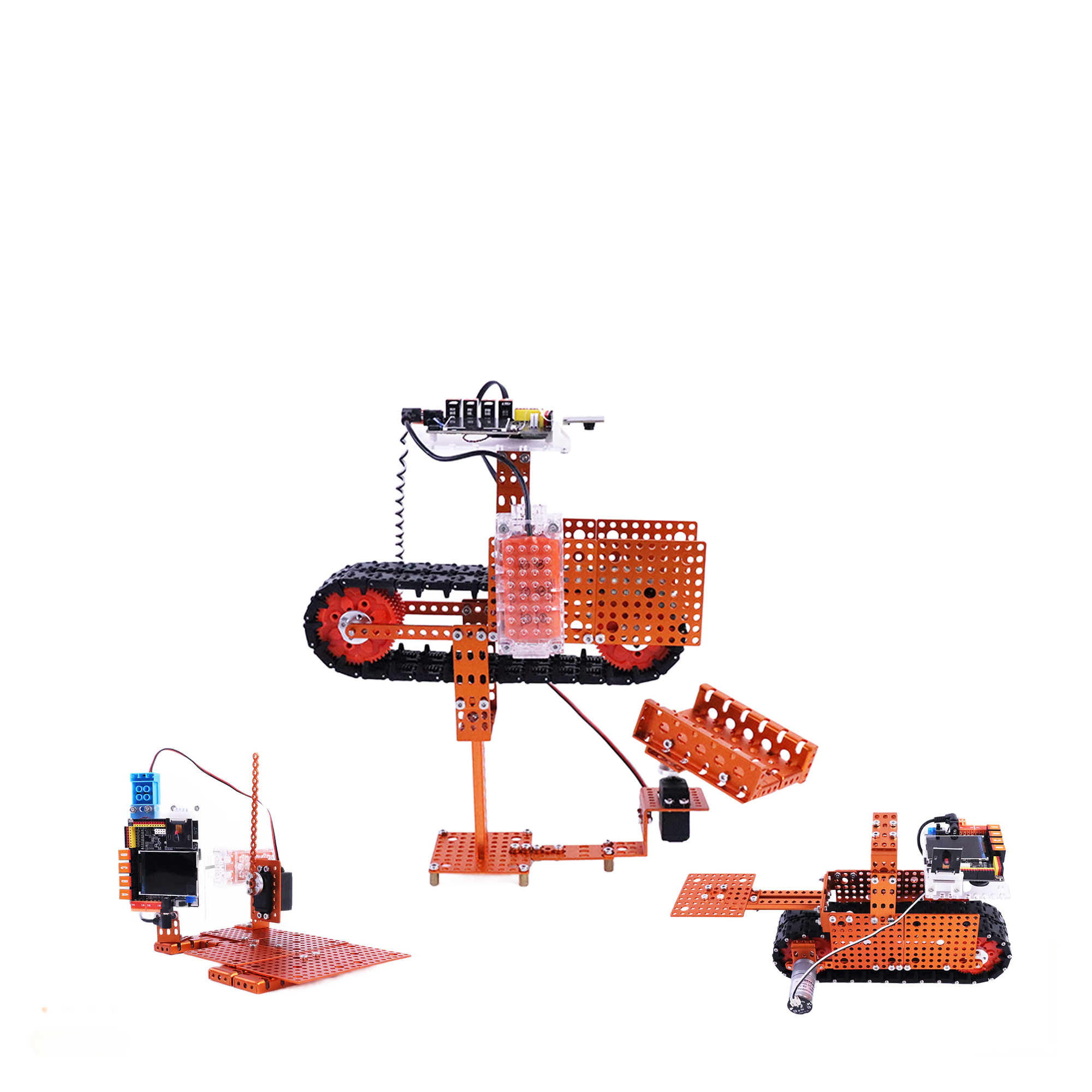
.png) 5. Robot marcheur : Le robot marcheur est un robot qui peut simuler des personnes marchant en avant et en arrière. Entraîné par un seul moteur à courant continu, ce robot est composé de plusieurs mécanismes de transmission.
5. Robot marcheur : Le robot marcheur est un robot qui peut simuler des personnes marchant en avant et en arrière. Entraîné par un seul moteur à courant continu, ce robot est composé de plusieurs mécanismes de transmission.
.png) 6. Robot auto-équilibré : Le robot auto-équilibré est un robot qui peut être conduit par deux roues. Soutenu par un capteur à 3 axes et un gyroscope et deux moteurs à courant continu encodeur.
6. Robot auto-équilibré : Le robot auto-équilibré est un robot qui peut être conduit par deux roues. Soutenu par un capteur à 3 axes et un gyroscope et deux moteurs à courant continu encodeur.
.png) 7. Robot barman : Un robot qui peut se déplacer très régulièrement et verser une bouteille de boissons. Nouvelle structure de châssis mobile.
7. Robot barman : Un robot qui peut se déplacer très régulièrement et verser une bouteille de boissons. Nouvelle structure de châssis mobile.
.png) 8. Camera Dolly : Il se déplace très régulièrement. Le support peut fixer votre téléphone portable pour prendre des photos et des vidéos.
8. Camera Dolly : Il se déplace très régulièrement. Le support peut fixer votre téléphone portable pour prendre des photos et des vidéos.
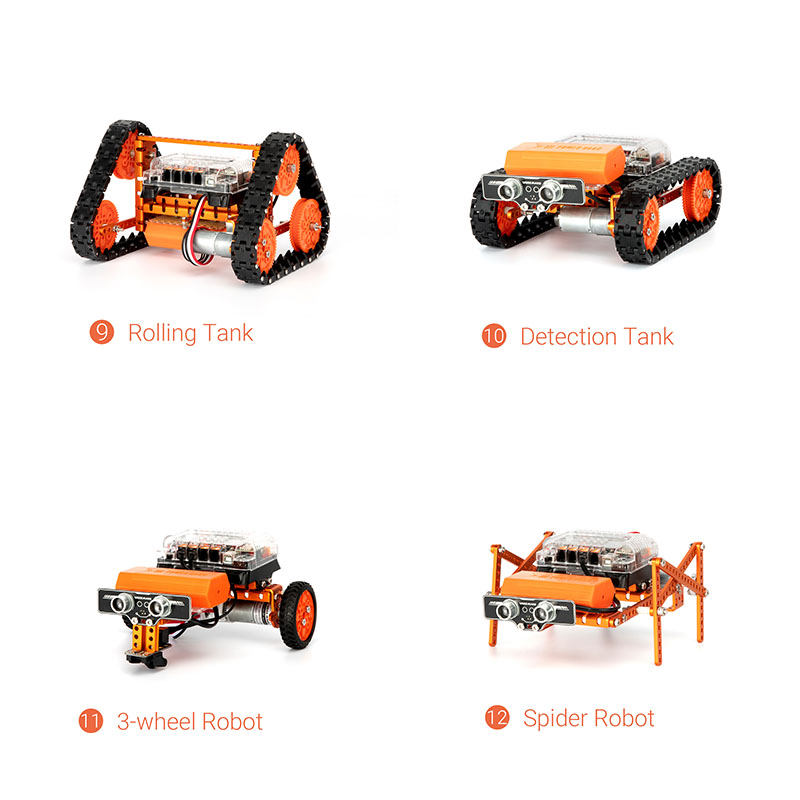
.png) 9. Rolling Tank : Rolling Tank est un robot triangulaire qui peut se déplacer sur une surface inégale.
9. Rolling Tank : Rolling Tank est un robot triangulaire qui peut se déplacer sur une surface inégale.
.png) 10. Robot à trois roues : Le robot à trois roues est la forme la plus rapide et la plus flexible de ce kit. Je recommande de relever le défi de suivi de ligne sous cette forme.
10. Robot à trois roues : Le robot à trois roues est la forme la plus rapide et la plus flexible de ce kit. Je recommande de relever le défi de suivi de ligne sous cette forme.
.png) 11. Robot araignée : Le robot araignée a quatre pattes, se déplaçant comme une araignée. Construisez ce formulaire pour apprendre la structure de la conduite à quatre jambes par deux moteurs.
11. Robot araignée : Le robot araignée a quatre pattes, se déplaçant comme une araignée. Construisez ce formulaire pour apprendre la structure de la conduite à quatre jambes par deux moteurs.
.png) 12. Réservoir de détection : Le réservoir de détection est un robot à châssis mobile avec des chenilles, sa flexibilité est bonne. Les roues de chenille peuvent se déplacer sur un sol accidenté ou franchir de petits obstacles.
12. Réservoir de détection : Le réservoir de détection est un robot à châssis mobile avec des chenilles, sa flexibilité est bonne. Les roues de chenille peuvent se déplacer sur un sol accidenté ou franchir de petits obstacles.
Carte mère ELF
La carte mère WEEEMAKE ELF est conçue sur la base d’un style de conception modulaire dont la micropuce est remplaçable. Cette carte mère haute performance est conçue pour l’éducation.
1. Micropuce remplaçable : prend en charge ATMEGA-328P, puce ESP32, etc.
2. Même port pour le pilote de moteur et le port de broche du capteur, facile à utiliser.
3. Câblage aléatoire, fonctionne avec WeeeCode et Arduino.
.png)
| Tension de fonctionnement : | 6 à 12 V |
| Port de câblage : | 1x port MCU (ATmega 328p ou ESP32) |
| 4 ports RJ11 | |
| 2 x port de moteur DC | |
| 6 x port de conversion à broches (dont 4 peuvent être des ports pas à pas/encodeur/moteur à courant continu) | |
| 1 x port de communication sans fil (Bluetooth 2.4G) | |
| 1x port USB (type B) | |
| Électronique embarquée : | 1x Buzzer |
| 1x bouton | |
| 1x LED RGB | |
| Softare : | WeeeCode (Scratch 3.0) |
| Arduino IDE |
Téléchargement du manuel
Nouvelle version V2.0 – mise à niveau vers la pince robot en métal !

Ancienne version V1.0 – kit de préhension acrylique.

Cursus
| Forme | Chapitre | Objectifs d’apprentissage | Heure d’apprentissage | Heure d’assemblage |
| Robot marcheur | Chapitre 1 | Encodeur de contrôle Moteur à courant continu | 90 minutes | 3 heures |
| Chapitre 2 | Lampe de contrôle RGB | |||
| Chapitre 3 | Combinaison d’un moteur à courant continu encodeur et d’une lampe RVB | |||
| Réservoir roulant | Chapitre 4 | Robot piloté par la lumière | 90 minutes | 3 heures |
| Chapitre 5 | Robot à commande vocale | |||
| Robot araignée | Chapitre 6 | Robot télécommande infrarouge | 90 minutes | 3 heures |
| Chapitre 7 | Robot chantant | |||
| Robot de détection | Chapitre 8 | Robot d’évitement d’obstacles | 90 minutes | 3 heures |
| Chapitre 9 | Robot suivant | |||
| Robot à 3 roues | Chapitre 10 | Robot suiveur de ligne | 90 minutes | 3 heures |
| Chapitre 11 | Suivi de ligne combiné à l’évitement d’obstacles | |||
| Robot élévateur | Chapitre 12 | Limiter le robot télécommandé infrarouge | 90 minutes | 3 heures |
| Chapitre 13 | Télécommande infrarouge contrôle de vitesse Chariot élévateur Robot | |||
| Caméra Dolly Robot | Chapitre 14 | Contrôle précis du moteur à courant continu de l’encodeur | 90 minutes | 3 heures |
| Chapitre 15 | Robot barman télécommandé | |||
| Bras robotique 4DOF | Chapitre 16 | Télécommande Bras mécanique à trois axes | 90 minutes | 3 heures |
| Chapitre 17 | Télécommande Régulation de la vitesse Bras mécanique à trois axes | |||
| Robot barman | Chapitre 18 | Robot barman télécommandé | 90 minutes | 3 heures |
| Chapitre 19 | Robot barman automatique | |||
| Réservoir de bras de robot | Chapitre 20 | Télécommande Robot Arm Tank | 90 minutes | 3 heures |
| Chapitre 21 | Limiter la télécommande Robot Arm Tank | |||
| Chapitre 22 | Robot de manutention automatique | |||
| Lanceur de balles | Chapitre 23 | Robot d’éjection à distance | 90 minutes | 3 heures |
| Chapitre 24 | Lancer la fonction d’invite | |||
| Chapitre 25 | Robot d’éjection à distance complet | |||
| Robot auto-équilibré | Chapitre 26 | Mesure et application de l’accélération du capteur de gyroscope | 90 minutes | 3 heures |
| Chapitre 27 | Mesure et application de l’angle du gyroscope | |||
| Chapitre 28 | Robot télécommandé complet |














Avis
Il n’y a pas encore d’avis.